长期关注的研究方向
具身智能
强化学习
机器人控制
Sim2Real 迁移
多传感器融合
感谢您在百忙之中查阅。我目前就读于西安交通大学自动化专业,聚焦具身智能与机器人控制。 我热爱在实验室中打磨算法与硬件系统的过程,期待在导师的悉心指导下,为解决领域内的核心挑战贡献绵薄之力。
我由衷热爱机器人学,并希望在“感知-决策-控制”的闭环研究中长期深耕。
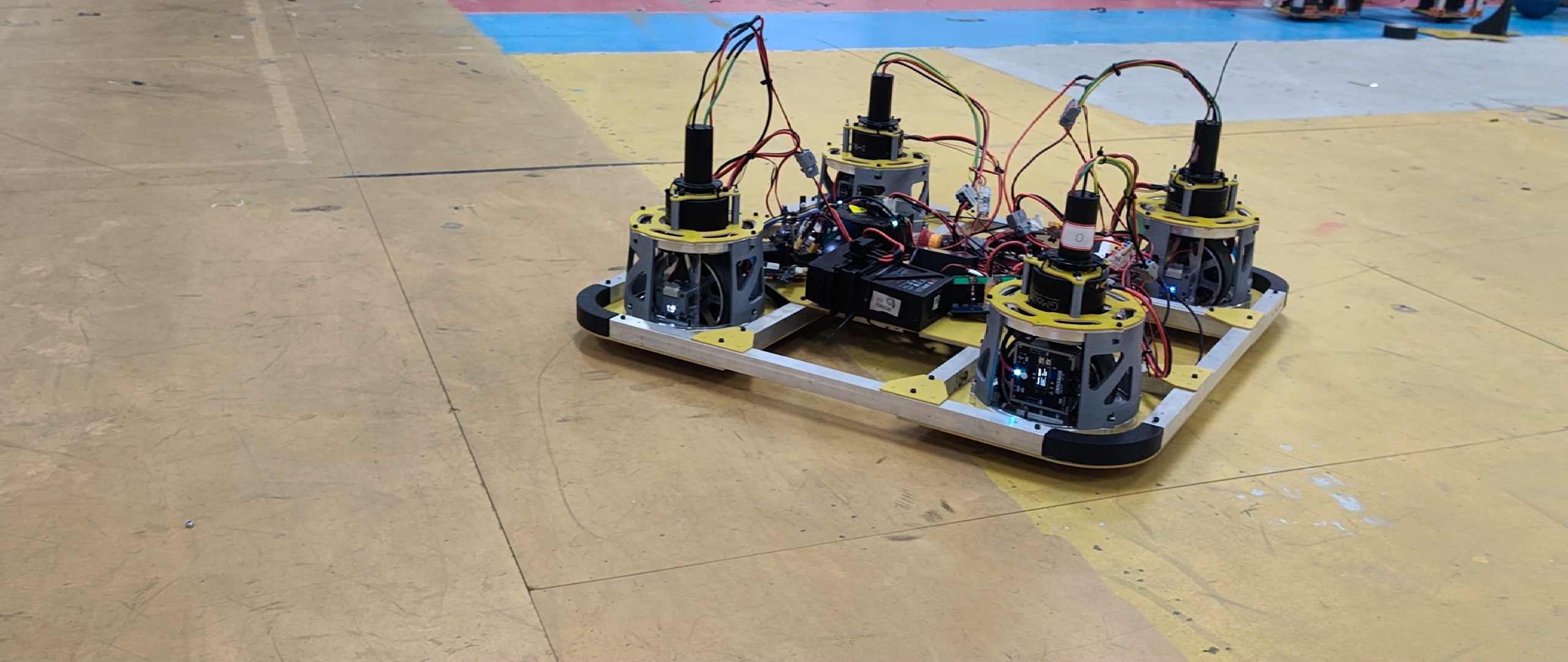
在团队中担任 R2 车长,深刻体会到了工程落地中“系统思维”与“团队协作”的价值。
核心成长:构建了高性能反馈链路,并在现场联调中不断优化系统的稳定性与鲁棒性。



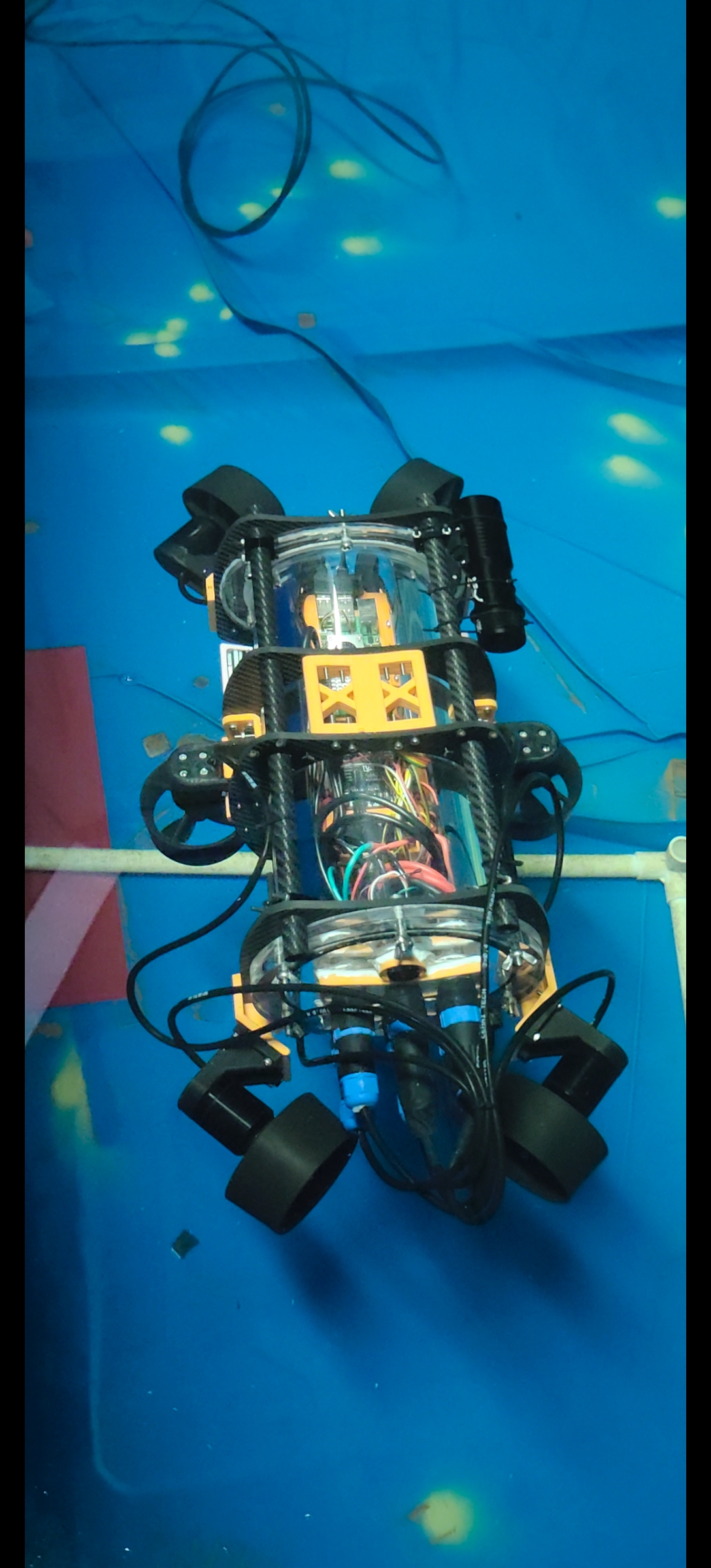
从 ROV 到 AUV,通过跨场景的挑战,不断磨炼自己处理复杂工况与非确定性环境的能力。
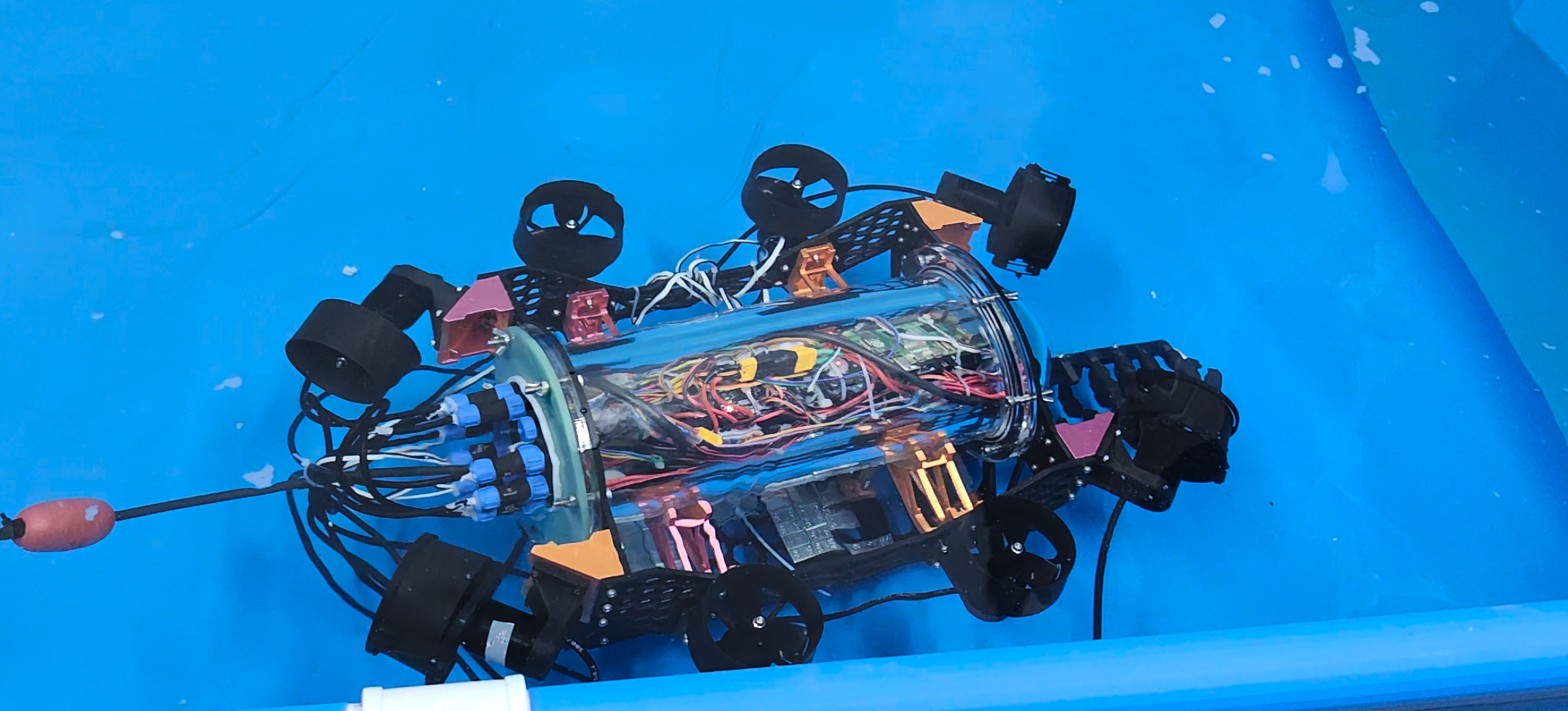
优化执行机构,致力于提升水下作业的可靠性。

针对复杂工况进行推进链路调优与系统稳定性验证。
完成了自主导航基础验证,开启了机器人学探索之路。
正积极复现 Unitree G1 仿真流程。在探索奖励设计的过程中,我深感科研的精微,正努力通过实践查漏补缺。
完成了 CS231n 课程实践。通过手写模块,我进一步巩固了对感知算法底层的敬畏与理解。









-水下机器人-水中作业项目(总决赛)-Y2509T1449769-传奇战神龙王队获奖证书.jpg)